2024/04.04 星期四
?��????????????, ??????????????.
一般游戏会经历:【策划设计】,之后【玩家游玩】 的 两个核心环节。如何判断一个机制的好坏可以通过这两个节点以及从游戏到玩家的过程来分析来分析。
首先游戏既然作为游戏,就必须是得要吸引玩家去游玩的,换句话说,游戏应该需要拥有内在的驱动力,去驱动玩家在游戏中的行为。如果说,一个机制的核心,不能让人通过某一形式收获快乐,不能够支撑起玩家游玩的动机,那么我们会认为,这个游戏的机制设计是失败的。
游戏无法吸引玩家游玩,游戏的设计再怎么样也难以展现,从而从根本上导致了游戏必定不会好玩。
机制,在能驱动玩家游玩的基础之上,需要提供给玩家良好的游戏体验,这一点主要是强调游戏中的机制的设计的合理性。
如果在游戏中,某一机制并不能参与游戏的循环,那么就可以认定其实际上不具有机制的优越性,即使游戏可能也能够在其他地方驱动玩家去体验游戏,但是同时,较差的游戏体验也会将游戏的水准拉低一个档次。
如果说,策划期望让游戏达到某一效果,但是实际上却达到了另外一个效果,那么实际上,这个机制也是失败的。当然,也不排除有些时候设计目标本身就比较模糊或者存在即使是没有达到目标,但是设计的机制却在另外一方面得到了很大的效果。
但是一般而言,锚定着设计目标就可以避免出现,设计到最后,本身是为了休闲的游戏,是7分解密、轻松,3分动作类的游戏,变成了1:9的直接就是掘地求生类型的游戏,我认为这是没有必要的。
设计可供多人游玩的桌面游戏
保证游戏整体切实可行
突出一个核心机制,确保该机制的可玩性和系统整体的简洁
在确保核心机制完善且有趣的情况下再添加延伸机制和平衡性的考量
突出机制创新,鼓励借鉴,严禁抄袭
重视测试与迭代,建议留出一半以上时间迭代,迭代需要体现在实习日志中 ## 任务完成
设计内容包括但不限于:
你需要提交的是
我们期待现场试玩你的游戏! *如果能在现场展示的话会更好 ## BONUS:(加分项)
对玩法的有效验证以及对机制可行性的验证
合理的游戏背景,世界观和角色设定
游戏具有较好的重开性以及深度
时刻review你的文档,确保可读性
确保规则文档的可读性和条理性,保证你的玩家看得懂规则
在上万种已知桌游产品中,蕴含着比较多的游戏机制和系统,下面介绍的是比较常见的机制,你可以发散思维对各类机制进行融合创新,从而完善你的游戏:
完成不好的BONUS是减分项
#
微积分
### 求曲面某点的法向量
求曲面某点的切平面涉及曲面在该点的微分性质。以下是求曲面某点切平面的基本步骤:
确定曲面方程:首先,我们需要知道曲面的数学方程。例如,曲面可能由函数 \(z = f(x, y)\) 定义。
计算偏导数:为了找到切平面,我们需要计算曲面方程关于 \(x\) 和 \(y\) 的偏导数。对于函数 \(z = f(x, y)\),偏导数分别是 \(f_x(x, y)\) 和 \(f_y(x, y)\)。
计算切向量:在曲面上的任意点 \((x_0, y_0, z_0)\),切向量是 \(\mathbf{T} = \left\langle f_x(x_0, y_0), f_y(x_0, y_0), -1 \right\rangle\)。注意,这里的 \(-1\) 是因为我们是通过 \(z\) 轴来看曲面的。
确定切平面方程:切平面通过点 \((x_0, y_0, z_0)\) 并且与切向量 \(\mathbf{T}\) 垂直。因此,切平面的法向量也是 \(\mathbf{T}\)。使用点法式方程,切平面方程可以表示为:
\[ f_x(x_0, y_0)(x - x_0) + f_y(x_0, y_0)(y - y_0) - (z - z_0) = 0 \]
验证:为了验证答案,你可以检查这个平面是否确实在曲面上通过点 \((x_0, y_0, z_0)\) 并且与曲面在该点相切。
以上步骤提供了一种通用方法来找到曲面在某点的切平面。请注意,这些步骤假设曲面是光滑的,即偏导数在所需点处存在。如果曲面在某点处不光滑,那么这些步骤可能不适用。
这是我参加冰岩作坊的实习的时候所创作的一款桌游,这款游戏有着十分优秀的设计,精妙的架构,平衡的数值。
虽然只是使用7天构建的游戏,但是其拥有惊人的简洁、自洽、深度……
我认为在开头的地方应该感谢一下我的好友 @Ting(汤俊)@?(王仁喆)@画上蓝(南仔龙),是他们为我的灵感赋能、帮我测试了核心玩法的可行性、探讨了机制的合理性、探索了游戏可能的复杂性,并且协助我最后一步步将游戏打磨成现在的这个样子。
下面我将介绍这款桌游:
在不远的未来,地球能源危机愈发严重,传统的能源供应方式已无法满足人类社会的需求。两大顶尖科技集团,分别由两位天才工程师领导,他们在一场前所未有的能源竞赛中展开对决。这场竞赛采用的是全新的能源采集技术——量子能流动力学。
在名为“量子脉冲”的项目中,工程师们通过研发能够产生和转换不同等级量子能量的微型机器,试图创建出高效的能源生态系统。这些微型机器只有在精密搭建的能源矩阵——一块4x4的微缩空间内运作时,才能最大化地采集和转换能源。
游戏中的每一张卡牌代表着不同的技术和事件,例如电池卡代表了能源储存技术,机器卡则是不同类型的能源生成器或转化器,而强化框架卡则代表着先进的辅助技术模块。玩家扮演其中一名工程师,通过智慧和策略,在这个微观世界中构建属于自己的能源帝国。
《能源矩阵》是一款双人对决、同时也最多兼容4人游玩的桌面游戏,玩家通过构建和管理能源矩阵上的机器来积累能源(分为ABC三个等级)。游戏目标是在资源产出与对手的竞争中,使自己任一等级资源达到对手相应资源积累值的阈值(A高出12格,B高出8格,C高出4格),从而造成伤害并削减对方血量。每位玩家初始有3点血量,血量归零视为败北。
积分器样式:
注意,记分规则在双人模式和多人模式有所不同,在双人模式为对抗制度,在多人模式为积分制度,同时,游戏获胜条件也有所不同。(实际上,比较推荐双人对战或者2v2。)
手牌 - 包括机器卡、事件卡和强化框架卡,所有卡牌背面统一为电池标志。
4x4放置板(能源矩阵) - 玩家在其上布局和激活机器。
事件队列 – 用于放置并触发事件牌。
电池
所有的牌,背面朝上都可以作为电池使用。
覆盖在4*4能源矩阵上,为所在行或者列提供电压,多张电池可叠加提高电压等级。
示例:
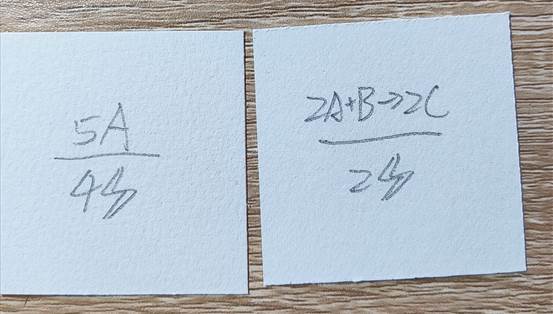
机器
- 分为产出机器和转化机器,需放置在与自身电压需求匹配的格子上才能工作。
- 产出机器直接产出资源A、B、C。
- 转化机器除了电压需求外,还需要相邻格子上有特定资源才能启动。
左图:产出机器;右图:转化机器。上面的是功能说明,下面的是需要的电压等级。
举例:
1. 产出机器: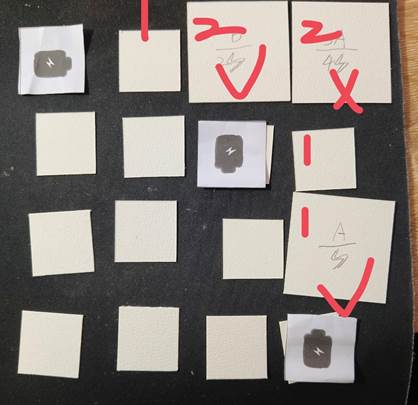
2. 转化机器: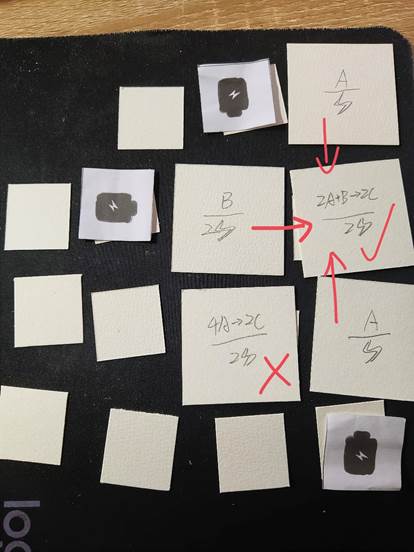
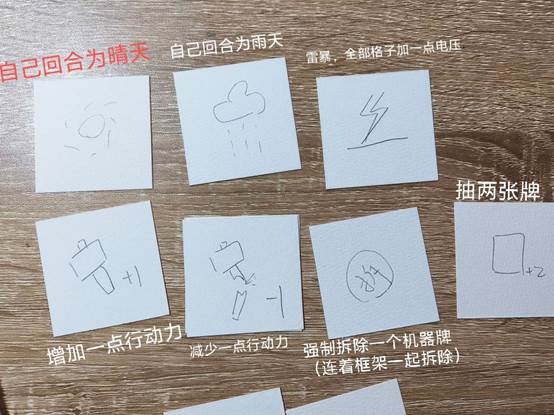
事件牌
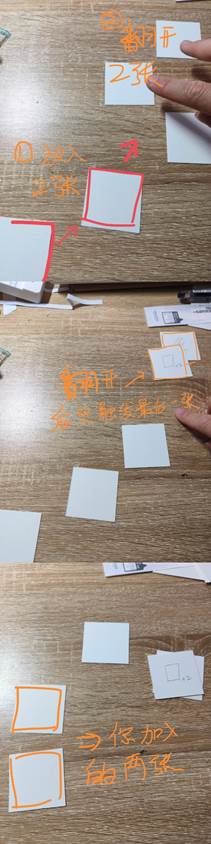
- 通过“事件队列”机制触发。玩家每回合从手中选择一定数量的牌放入事件队列尾部,并在事件队列头部翻开同样数量的牌,最后一个翻开的牌所展示的事件生效,如果不为事件牌,则无事发生。
图解:选择放入一张:
选择放入两张:
图例:
强化框架
- 提供额外效果,增强机器性能,如月亮框架在月光事件下增加产能,超频框架提高电压需求同时增加产能。
- 图例: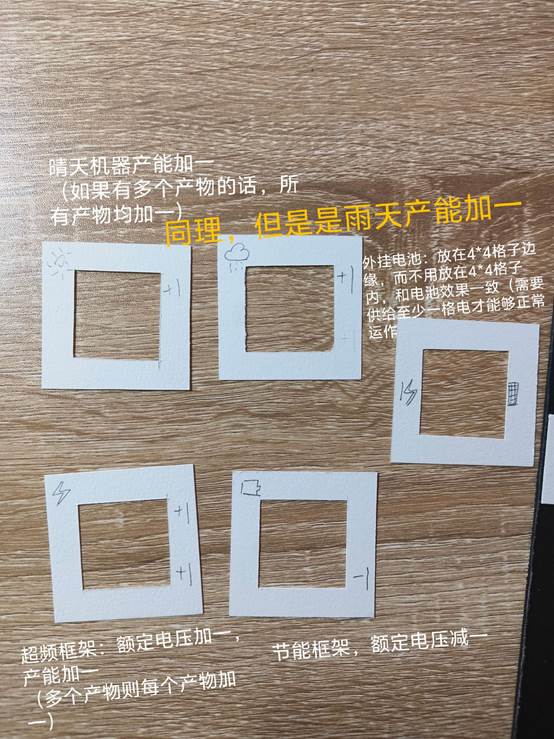
游戏时长20min
1. 初始化 - 双方各自准备3张牌作为血条置于能源矩阵边缘,并抓取7张起始手牌,抽到强化框架则额外再抽相同数量的牌。确定先手玩家,从先手玩家起顺时针进行游戏。
2. 回合开始 - 先手玩家开始,依次放置4张牌(各两张)至事件队列,然后将第一张移入弃牌堆。
3. 抽牌阶段 - 每回合抽2张牌,若抽到强化框架则额外再抽相同数量的牌,先手玩家首回合仅抽1张。
4. 事件阶段 – 选择在事件队列队尾依次加入n张手牌(n不小于一),然后翻开事件堆顶部n张牌,执行最后一张翻开的事件效果作为你的回合发生的事件,若不为事件牌则视为无事发生。
5. 构建阶段 - 玩家有三个行动点,下面行动都会消耗行动点:
a) 布置电池作为电源。
b) 将机械放置在能源矩阵上。
c) 给机器添加强化框架。
d) 拆除机械、强化框架或者电池,其中,拆除的机械回到手牌,拆除的电池和强化框架移入弃牌堆。
6. 结算阶段 – 玩家可以按任意顺序触发并结算已正确连接和供电的机器,推进相应的资源计分标志。
a) 计分工具为三个“尺”和三个标识物,分别对应ABC三种等级的能源,游戏开始时标识物摆放在刻度0处,当你产生能源时,将标识物往对方推动相对应的格子数目,当标识物推到刻度外时,视为达到阈值。
比如c的积分器长这样:
7. 回合结束 - 若某项资源达到阈值,则对手从代表血条的卡中抽走其1张手牌并从牌堆摸1张牌;若获得强化框架,则再次抽相应数量的牌。然后将标识物移回0刻度处,多余的能源将不会再使其移动。
当一方血条耗尽,另一方即为胜者。
游戏时长30+min
1. 初始化 – 所有玩家各自准备2张牌作为血条置于能源矩阵边缘,然后抓取8张起始手牌,抽到强化框架则额外再抽相同数量的牌。确定先手玩家,从先手玩家起顺时针进行游戏。
2. 回合开始 - 先手玩家开始,依次放置2n张牌(每名玩家各两张)至事件队列,然后将第一张移入弃牌堆。
3. 抽牌阶段 - 每回合抽2张牌,若抽到强化框架则额外再抽相同数量的牌,先手玩家首回合仅抽1张。
4. 事件阶段 – 选择在事件队列队尾依次加入n张手牌(n不小于一),然后翻开事件堆顶部n张牌,执行最后一张翻开的事件效果作为你的回合发生的事件,若不为事件牌则视为无事发生。
5. 构建阶段 - 玩家有三个行动点,下面行动都会消耗行动点:
a) 布置电池作为电源。
b) 将机械放置在能源矩阵上。
c) 给机器添加强化框架。
d) 拆除机械、强化框架或者电池,其中,拆除的机械回到手牌,拆除的电池和强化框架移入弃牌堆。
6. 结算阶段 – 玩家可以按任意顺序触发并结算已正确连接和供电的机器,推进相应的资源计分标志。
a) 每名玩家都有计分工具为三个“尺”和三个标识物,分别对应ABC三种等级的能源,游戏开始时标识物摆放在刻度0处,当你产生能源时,将标识物朝终点推动相对应的格子数目,当标识物推到刻度外时,视为达到阈值。
7. 回合结束 - 若某项资源达到阈值,则对手从代表血条的卡中抽走其1张手牌并从牌堆摸2张牌;若获得强化框架,则再次抽相应数量的牌。然后将标识物移回0刻度处,多余的能源将不会再使其移动。
a) 在多人模式中,每将一种能源达到阈值,都将会使得其阈值线提高至下面的点数
| 能源等级 | 0 | 1 | 2 | 3 |
| A | 24 | 30 | 36 | 42 |
| B | 16 | 20 | 24 | |
| C | 10 | 12 | 15 |
最先达到三次阈值的人获得胜利。
游戏时长30+min
1. 初始化 – 两队各自准备4张牌作为血条置于能源矩阵边缘,然后每名抓取8张起始手牌,抽到强化框架则额外再抽相同数量的牌。确定先手队伍,从先手队伍起按照1324顺序两队交替进行游戏。同时,每名玩家还会拥有一张“虫洞”卡,虫洞卡不需要考虑耗电也不能作为电池,连接在虫洞上的同队的机器视为相邻,虫洞的放置和拆卸都需要消耗行动点。
2. 回合开始 - 先手玩家开始,依次放置2n张牌(每名玩家各两张)至事件队列,然后将第一张移入弃牌堆。
3. 抽牌阶段 - 每回合抽2张牌,若抽到强化框架则额外再抽相同数量的牌,先手玩家首回合仅抽1张。
4. 事件阶段 – 选择在事件队列队尾依次加入n张手牌(n不小于一),然后翻开事件堆顶部n张牌,执行最后一张翻开的事件效果作为你的回合发生的事件,若不为事件牌则视为无事发生。
5. 构建阶段 - 玩家有三个行动点,下面行动都会消耗行动点:
a) 布置电池作为电源。
b) 将机械放置在能源矩阵上。
c) 给机器添加强化框架。
d) 拆除机械、强化框架或者电池,其中,拆除的机械回到手牌,拆除的电池和强化框架移入弃牌堆。
6. 结算阶段 – 玩家可以按任意顺序触发并结算已正确连接和供电的机器,推进相应的资源计分标志。
a) 计分工具为三个“尺”和三个标识物,分别对应ABC三种等级的能源,同队的两个人产出的能源在同一个积分器上结算。游戏开始时标识物摆放在刻度0处,当你产生能源时,将标识物往对方推动相对应的格子数目,当标识物推到刻度外时,视为达到阈值。
b) 在2v2模式中,阈值更改为1v1中的两倍。
8. 回合结束 - 若某项资源达到阈值,则对方队伍从代表血条的卡中抽走其1张手牌并从牌堆摸1张牌;若获得强化框架,则再次抽相应数量的牌。然后将标识物移回0刻度处,多余的能源将不会再使其移动。
当一方血条耗尽,另一方即为胜者。
1. 需要为长远考虑得规划格子的使用以及电池的拜访,不然你后期可是会很难受的hh
2. 使用转化牌收益往往比直接产出能源更高
3. 合理使用事件牌 ,将差的事件推给对面,将好的事件卡给自己(当然,你也可以豪赌“我要截胡对面的正面事件牌”)
4. 事件牌的机制实际上暗示着,你可以通过塞两张牌来跳过一张你不想要的牌……
5. 大部分强化框架需要搭配事件才能产生作用,注意你手中的牌,看看能不能创造这个机会。
6. 被扣一点血之后可以瞬间拿到两张牌,加上自己的回合开始拿牌,一共是4张,抓住这个机会!反超对面!
7. 超出阈值之后的多出来的能源并不会继续将标志物向前推进,或许可以通过某些微操使得本应该多出来的这部分转化为别的东西……
8. 具有负面效果的牌不一定永远是负面的,比如说磁暴牌,当对面机器成型了之后甩给别人这张牌,那可是致命的……但是如果你在前期将其对自己使用,那么就省去了很多摆放电池的功夫
9. 强拆建筑不一定是差的,思考将其甩给自己能有什么妙用——能够直接拆除我不想要的机器和蒙版!而这可是本来需要两个行动点才能干的事情……用来升级设备再合适不过了。
游戏的核心玩法为在四格的中,通过操作画幅来解谜。
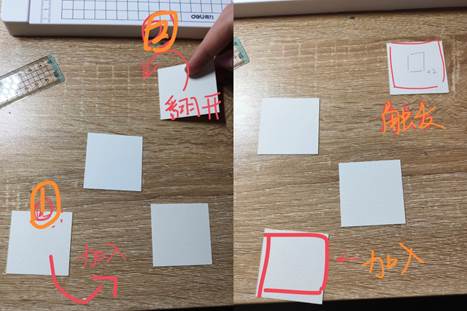
将其解构,玩家的操作有四种:
通过“画框”的剪切与裁剪,使得玩家可以把物品套入画框,或者使物品脱出画框(有点像图层的意思)。从而实现物品的传递,主角位置的变化,或者齿轮的联动,以及特殊物品的构成(给苹果上材质,获得金币)。常见的画框有:门,相框,圆圈的边缘……
通过画面的拼接,来对两个不同画面之间的内容进行链接,使得玩家可以从一个场景跳转到另外一个场景。或者使两个场景中的不同的内容进行勾连。
通过不同画面之间物品的相互影响来解密:指南针会指向北极星。
通过机关的旋转:只有将机关旋转到合适的位置,使其正面朝上,才能够进入
为什么说这种解密方式好呢?因为其无需说明规则,因为规则本来就是我们这个物理世界的常识,只不过在游戏中,他还加入了自己的奇思妙想。
将画幅拼接到一起,不只意味着画布的相连,更意味着真正意义上的时空的相连。只要意识到了这一点,那么你就已经对于这个游戏的规则了然于心。